變更語言 :
igus 機器人控制軟體
無需許可證即可編輯、模擬和控制機器人
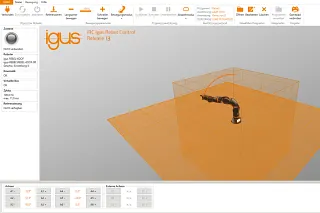
igus機器人控制軟體可實現簡單直覺的機器人編程和控制系統,輕鬆開始自動化。由於採用模組化結構,各種機器人運動學,例如。可控制並聯手臂機械、線性機器人、多軸關節機械手臂。該軟體可用於模擬機器人在 3D 表面上的單一運動——此步驟無需連接機器人。
您可以在此頁面上找到什麼
免費機器人軟體
使用機器人軟體的各種應用程序的程序示例
- 機器人與控制系統之間的簡單連接
- 透過 3D 介面和數位孿生進行直覺操作,可直接執行和檢查運動序列
- 可直接透過控制系統和軟體進行相機介面配置
- Delta、線性、SCARA、關節式機械手臂機器人的編程
- 軟體可在購買前進行無風險測試
系統需求:
- 搭載 Windows 10 作業系統的套件
- 透過乙太網路或 WLAN 進行通信
- 500MB可用磁碟空間
範例程式設計、wiki 和訓練課程



介面
PLC 介面
PLC 接口(PLC = 可編程邏輯控制器)可通過數字輸入和輸出來執行基本功能和狀態信號。除了 PLC 控制外,此介面還可以通過硬體按鈕進行操作。
數位輸入和輸出
可以加載和啟動機器人程序,並且可以透過數位輸入或全域訊號發送夾持器命令。這很有用,例如,如果要使用按鈕或 CRI-GSig 指令從給定的選擇中選擇一個編輯程式。
Modbus TCP/IP
例如,Modbus TCP 介面可用於向機器人控制系統發送 PLC 資料和指令並接收狀態資訊。
CRI 介面
CRI 介面支援使用 TCP/IP 透過乙太網路介面發送複雜指令並檢索資訊和設定。 igus 機器人控制使用此介面連接到具有整合控制系統或控制系統的其他實例的機器人。
相機介面
攝影機介面支援使用物件偵測和攝影機。物體偵測攝影機辨識物體的位置和類別,並將它們(選購)與視訊影像一起傳送到控制系統。控制系統根據攝影機的物體位置計算機器人座標系中的位置。純攝影機僅提供影像,因此只能用於監控工作區域,而不能用於偵測物體。
Cloud 雲端
雲端介面可讓機器人透過 RobotDimension 進行監控。啟動並登錄後,機器人將基本狀態資訊和相機圖像發送到在線服務。用戶可以在網站上列出他們的機器人並檢索資訊。
ROS、MATLAB、實驗室檢視等。
將機器人整合到您的 ROS 環境中。硬體通訊、Teleop 和 moveI 的文件和軟體包
專案組態
夾持器
可以在這裡指定組裝的工具。更改工具需要重新載入專案或重新啟動整合控制系統。可以將新工具定義為目錄“Data/Tools”中的設定文件
虛擬框
機械手臂的運動範圍受到虛擬框的設定限制。根據應用情況,此功能有助於防止機械損壞並簡化編程。如果執行的程式違反了虛擬框,則會停止並顯示錯誤訊息。
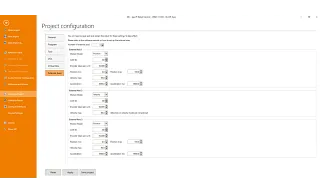
外軸
機器人控制系統支援最多3個附加軸(在iRC中也稱為「外部軸」)。這些可以根據機器人軸進行安裝,並透過 iRC 的配置區域進行配置。

編輯
在這裡您可以定義機器人和邏輯編輯程式、運動速度(最大速度的百分比)、回放模式以及對編輯錯誤的反應。
特殊運動學
可以使用數位孿生為您的機器人客製化機器人控制系統。我們配置逆運動學以適合您的專案業務。
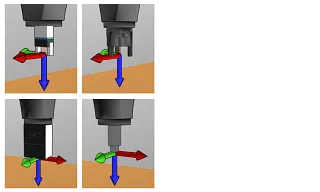
程式設計
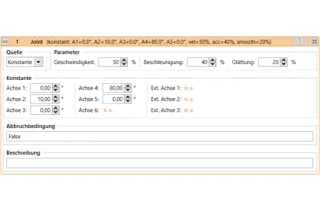
軸動
關節指令將機器人移動到軸座標中指定的絕對目標位置(例如軸帶彎角或直線軸的位置)。 TCP 的最終運動通常是曲線而不是直線。
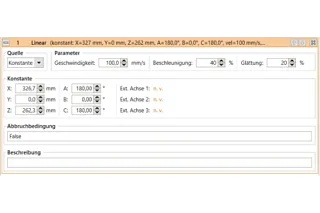
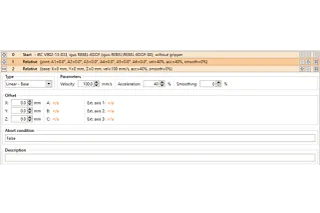
線性移動
「線性」指令將機器人移至以直角座標指定的絕對目標位置。TCP 的產生移動會遵循一條直線。
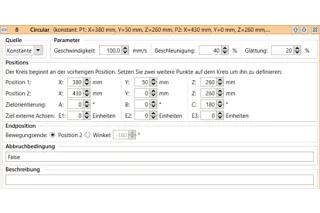
圓週運動
「圓週運動」指令可以實現沿著完整或部分圓形路徑的運動。它與線性運動相容,因此可以平滑地過渡到線性運動。
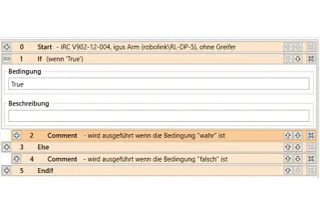
條件條
件可以在 if-then-else 指令、循環中使用,以及作為移動指令中的取消條件。條件可以是數字輸入、全局信號、布林操作和比較的組合。
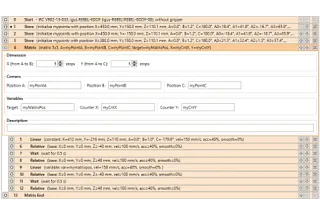
矩陣計算
網格指令計算與網格對齊的位置,例如作為堆疊任務的抓取或存放位置。
相對
「相對」指令可讓您將機器人相對於其目前位置移動。可以通過 " 動作 " → " 相對移動 " 下的菜單項進行訪問。

子編輯程式
使用sub指令可以呼叫子編輯程式。子編輯程式檔案的路徑在「檔案名稱」下指定。它與 iRC 資料夾“Data”的子資料夾“編輯”相關。
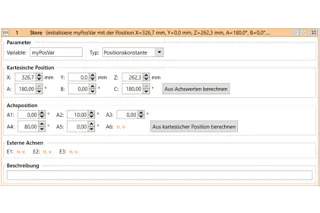
變數和變數訪問
igus Robot Control 和 TinyCtrl 的編輯器支援兩種類型的變數:
- 數字變數:這些可用於儲存整數或浮點數。
- 位置變數:這些可用於儲存笛卡爾位置和關節位置。此類變數是否解釋為笛卡爾位置或關節位置取決於上下文。
下載機器人軟體

免許可證的igus 機器人控制軟體整合到控制系統中,因此對一個系統的許多元件使用標準化的操作概念和一致的通訊服務。這意味著更少的專案規劃工作和更快的調試。
- 在軟體中提前測試所有 igus 運動學
- 為所有 igus 機器人、單軸和 AGV 提供預先編程項目
- 直覺的 3D 介面,可模擬機器人
諮詢
我很樂意解答您的疑問

出貨及諮詢
親自拜訪:
週一至週五 8:30 - 17:30
線上:
週一至週五 8:30 - 17:30
(可搜尋LINE官方ID-->@igustw)
Online:
24h
若無人在線,可留下您的問題跟聯絡資訊,我們會盡快與您聯繫。
您也可以直接發信到我們共用信箱tw-info@igus.net