robolink® W 常見問題——機械手臂關節結構套件
常見問題
1) 哪些類型的易格斯 關節現貨供應?
目前有 6 種不同的標準關節
1 – RL-50-PL1:擺動關節2 – RL-50-TL1:旋轉關節
3 – Rl-50-001:一個 2 軸關節,擺動範圍達 +/-90°(“舊款”)
4 – Rl-50-002:一個 2 軸關節,擺動範圍達 +130°/-50°(“不對稱”)
5 – Rl-50-003:一個 2 軸關節,擺動範圍達 +180°/0°(“折疊”)
6 – RL-90-BL1:2 軸基本關節(“更大、更強”)
此外,我們可根據需求提供特殊型號的關節。
2) 哪些角度設置是可能的?自重?扭矩?
以下清單提供了更多基本資訊。 我們的產品目錄中也有這張表格。| 訂購編號 | 電纜 數量 |
擺動 角度 |
旋轉 角度 |
重量 | 最大負載 | ||||
|---|---|---|---|---|---|---|---|---|---|
| 擁有 驅動器 |
可 反饋 |
標準 (含 止動器) |
選配 (*不含 止動器) |
標準 (含 止動器) |
選配 (*不含 止動器) |
[gr] | 擺動 [Nm] |
旋轉 [Nm] |
|
| 1. 擺動 關節 RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. 旋轉 關節 RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. 2 軸 |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. 2 軸 |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. 2 軸 關節 RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. 基本 關節 RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
目錄 (PDF)
3) 關節如何組合?
各關節都配有拉線。 在每種情況下,都必須通過下方的關節佈線。這意味著並非任何關節組合都是可行的。 但您可以組合出 1 到 6 DOF 的關節並實現多種運動性能。 我們將很樂意為您提供建議。下圖顯示了一些可能的組合,如果考慮更新類型的關節(如 RL-50-003 和 RL-90-BL1),還有無數的可能性!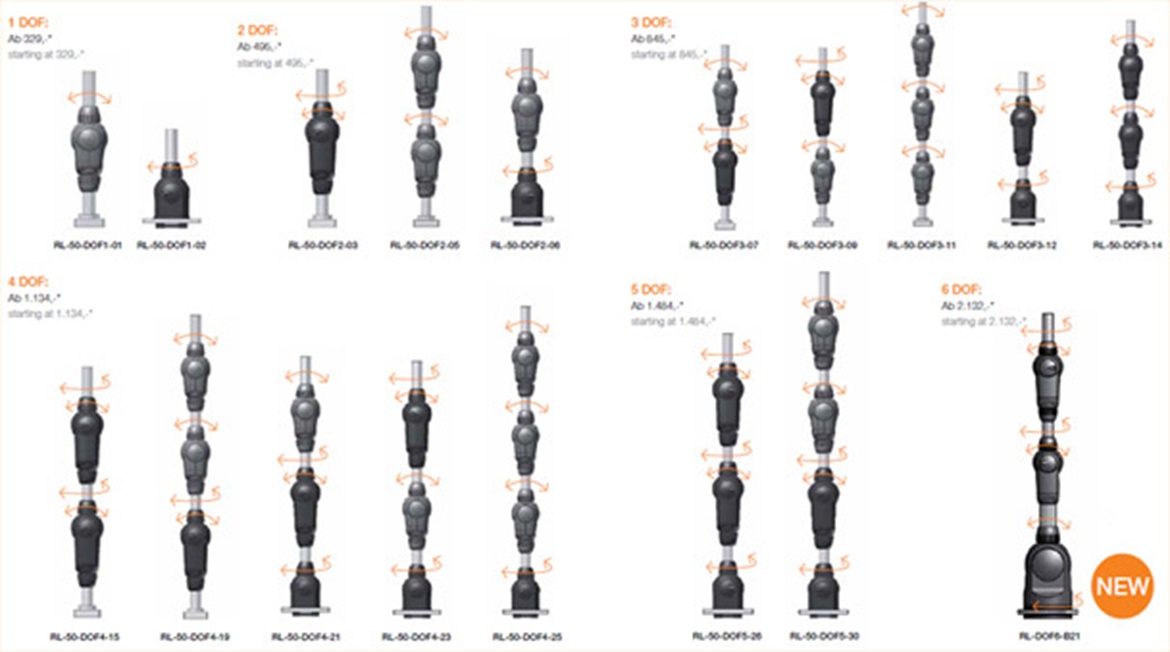
4) “模組化套件系統”是什麼意思?
robolink® 模組化結構套件的基本理念在於讓客戶可以選用各(機械)組件組配置一個機器手臂系統。 客戶可根據所需的複雜度,配置和訂購不同複雜度的關節臂。igus® 根據客戶要求製造機械臂,並提供隨插即用的裝置。 但不能簡單地將各個關節連接在一起(像樂高那樣)。5) 為什麼不能任意地修改關節臂?
所有關節都通過拉線運行。 每個自由度需要 2 條線(對立原理)。 如果上關節 (2) 的纜線引到無導向裝置的下關節 (1),兩個關節的運動將無法相互獨立。 為實現二者的獨立,必須將上關節 (2) 的纜線張力與下關節 (1) 的運動分離。 這需要在下關節開口處使用特別的博登纜線系統(如圖)。 纜線然後就可以在關節之間的連接軟管中自由運動。在 igus® 訂購多軸關節臂時,所有博登纜線元件都是預裝配的,完整系統總是以隨插即用的狀態交付,即所有纜線和導管都為指定配置。

1
空壓管(機械夾爪)
2四重博登電纜
3感測器電纜——關節 2
44 條電纜線在導管內自由移動
5用於旋轉運動的單博登電纜
68 條電纜線在導管內自由移動
6) 移動關節需要什麼電纜距離/力?
關節內部電線的工作點由指定尺寸定義:RL-50:有效直徑 50 毫米(旋轉和擺動運動)
RL-90:有效直徑 90 毫米(擺動運動)或 120 毫米(旋轉運動)
因此,RL-50 關節的纜線距離計算如下
90° 角運動時為 π x d/4 ≈ 39 毫米
180° 角運動時為 π x d/2 ≈ 79 毫米
纜線的拉力(取決於所施加的扭矩)可高達 600 N。
7) 關節的供應範圍包含哪些?
PA 2200 工程塑膠製成的裝配關節,包括軸承位置(硬質陽極化鋁 = 標準)
Dyneema 拉繩
鋁棒(每種情況均包括 100 毫米標準長度,根據要求提供特殊長度)
選配的角度感測器 (-WS),3 米感測器電纜, 裝配並經測試。根據與客戶達成的協議,將電線接頭作為連接材料免費提供。
8) 關節臂的供應範圍包含哪些?
所有的關節按照第 7 點預裝配
所有纜線都有特别的博登部件穿引,如第 5) 條所述
關節之間的鋁管,根據客戶規格客製化
關節臂底部的安裝板
穿過的感測器導線(選配-WS),每個情況下安裝並測試 3 米感測器導線。 根據與客戶達成的協議,將電線接頭作為連接材料免費提供。
9) “完整系統”的供應範圍包含哪些?
問題 6) 中描述的關節臂,還有 MIT 驅動裝置,包括:igus® 步進馬達,數量與關節臂中軸的數量相同
各馬達的行星變速箱
連接纜線和驅動裝置的“驅動輪”
方便重新調整驅動輪張力的“張力調整工具”
提供用於安裝馬達和機械臂的不同外殼
以下產品不包括在內:
機械夾爪(易格斯有供應,也可選配其他產品)
控制組件
動力電纜(易格斯有供應)
10) 使用了哪些角度感測器?
關節中採用了 Austriamicrosystems(AS5304A)的增量角度感測器(選配)。 絕對編碼器目前在技術上是不可行的。 為了定義零點位置,我們使用位於關節的旋轉/擺動範圍中間的霍爾感測器。 這意味著打開電源時各關節必須首先“初始化”。 技術文檔中提供了關於感測器接線和導線分配的更多資訊。編碼器的解析度是(因不同的關節而不同!):
關節尺寸 RL-50 所有旋轉運動上 4,640 個信號/360°
(29 個極對x 160 個信號/極對)≈ 0.078°
關節尺寸 RL-50 所有擺動運動上 4,960 個信號/360°
(31 個極對x 160 個信號/極對)≈ 0.073°
關節尺寸 RL-90 所有運動上 9,920 個信號/360°(“基礎”)
(62 個極對x 160 個信號/極對)≈ 0.036

1
用於旋轉運動的霍爾傳感器
2用於旋轉運動的編碼器
3用於擺動應用的編碼器
4用於旋轉運動的霍爾傳感器
標準感測器:
磁性增量角度感測器。 該感測器在各軸的解析度約為 0.07°。 所有感測器裝置對於相應的關節都易於安裝。各有 3 米長的感測器電纜(每個 DOF 有 6 個引線)。
磁性增量角度感測器。 該感測器在各軸的解析度約為 0.07°。 所有感測器裝置對於相應的關節都易於安裝。各有 3 米長的感測器電纜(每個 DOF 有 6 個引線)。
11) 關節臂能否適用水下應用?
可以。組件基本由工程塑膠 (PA2200)、陽極化鋁、不銹鋼(螺絲)、Dyneema 纜線 (PE)、銅線接頭構成。 可以訂購模壓感測器(-SE = 密封感測器)。

12) 可選擇什麼類型的驅動器?
有多種驅動裝置可用於移動纜線。 可選手動驅動(“螺桿”)、氣動部件(如氣動肌肉)或電動機(無刷直流馬達、直流馬達、伺服馬達、線性馬達、步進馬達)。 igus® 可提供帶行星變速箱的步進馬達,可選擇作為驅動裝置。 可用選擇:- NEMA23 步進馬達(絞線或連接器型),帶 1:16 變速箱
- NEMA17 步進馬達(絞線或連接器型),帶 1:35 變速箱
1
步進馬達
2變速箱
3可調張力的驅動輪

13) 如何控制 robolink® 關節臂?
易格斯不開發、製造和出售控制部件。 我們提供的 robolink® 系統限於關節臂或含“驅動裝置”的關節臂。控制部件必須由客戶自己提供或購買。
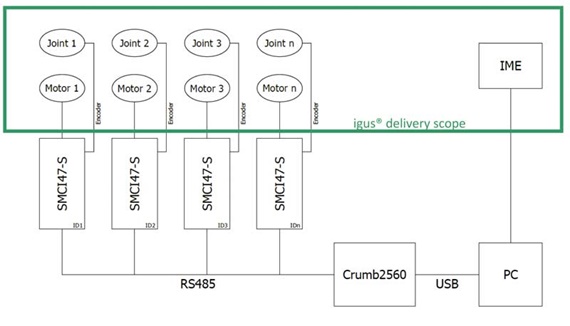
對於配備我們步進馬達的 robolink® 關節臂,igus® 提供免費的控制軟體(開源)。 該軟體具有簡單直觀的使用者介面,用於輸入角度位置和儲存簡單的運動。 軟體不適合搭配其他系統使用。 不包括輪廓控制系統(或逆向運動)。需具有硬體設定才可使用 IME 軟體(igus 運動編輯器)。 這基本包括 NANOTEC® 步進馬達控制器 (SMCI47-S2) 和 ATmega Crumb2560 晶片。 Atmega 晶片將於 2014 年春季在 igus® 發售(當前在互聯網上 CHIP45 有售)。 因此需要以下配置:
14) igus® 的控制軟體 IME(igus® 運動編輯器)如何使用?
該軟體可以免費下載。 該軟體具有圖形化使用者介面,可以對簡單的運動進行程式設計和儲存。不包括輪廓控制系統(或逆向運動)。安裝 IME軟體的最新檔案(德文)
15) 哪些材料可應用?
關節 :聚醯胺 PA 2200 零件、不銹鋼螺絲、硬質陽極化鋁製成的軸承環,可用 iglidur® J 或不銹鋼替代。連接管 :陽極氧化鋁,或 GRP 或 CRP
電線 :Dyneema 電線,黄銅線端接頭。
16) 可選用哪些機械夾爪?
“任何可能的”機械夾爪都可以與我們的機械關節臂組合。 由於系統的負載能力相對較低,機械夾爪應盡可能輕。 市場上有各種各樣的輕型氣動機械夾爪,例如來自 SCHUNK、FESTO 或 FIPA 公司的產品。 如果不希望使用氣動元件,那麼通常情況下,電動機械夾爪是必需的。 市場上有一些非常輕的電動機械夾爪,例如 GIMATIC、SCHUNK 或 SOMMER(然而比簡單的氣動機械夾爪要便宜得多)。 自 2013 年起,igus® 一直在提供簡單的塑膠機械夾爪,其中馬達位於 robolink® 管中。 也可以選擇在這裡單獨設計夾爪。17) 關節或“系統”的價格如何?
我們的目錄中有所有關節和系統的價格。 一般說來:包括馬達、變速箱、外殼、關節和感測器的“完整系統”,其價格為每個軸 1,000 歐元多點。 換句話說,6 DOF系統約 6,000 歐元。 不含馬達(但帶有感測器)的關節臂的成本約為其一半(即每軸約 500 歐元)。 範例:6 DOF ~ 3,000. 歐元-

6 DOF ~ 6,000. 歐元-


